Gondoltam építek egy ultrahang szenzoros riasztót. A cél az volt, hogy minél nehezebben lehessen kicselezni, bárhova telepíthető legyen, könnyen lehessen szállítani, és a mérete kicsi legyen.
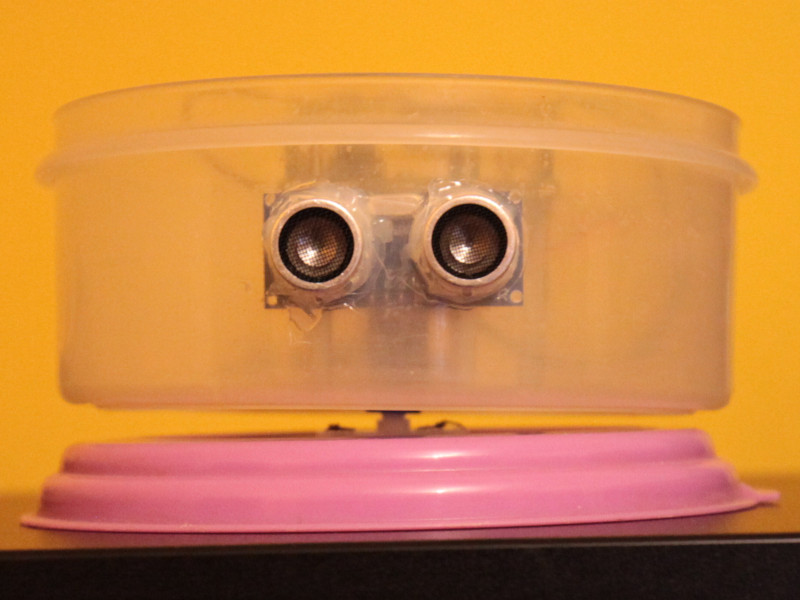
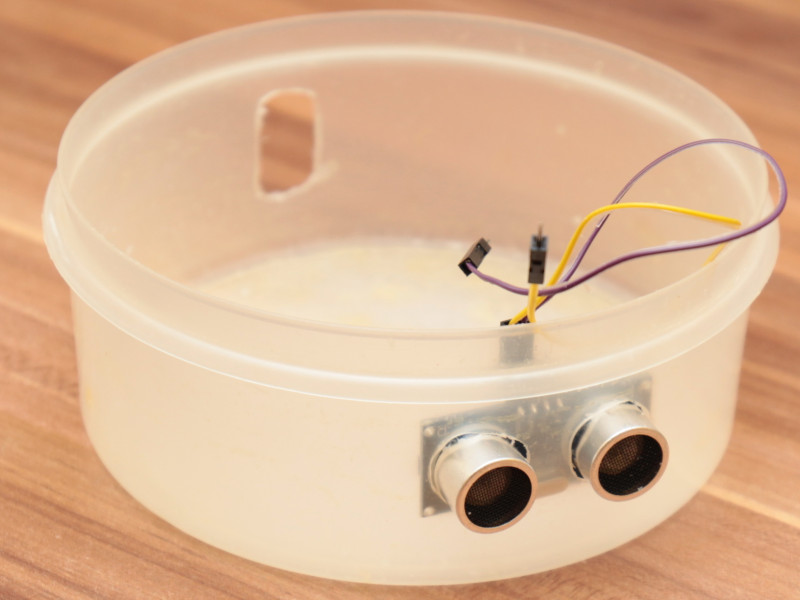
Így esett a választás az egyik műanyag ételdobozra, ami a sok mikrózás miatt már étel tárolására nem alkalmas. Kivágtam két lyukat rajta és beleragasztottam az ultrahang szenzort.
Rékötöttem egy AVRDuino-t, és elkezdtem tesztelni. A kód első verziója a neten is fellelhető tutorialokat utánozta. Arra voltam kíváncsi, mennyire hatékony a szenzor, ezért csak a távolság adatokat írattam ki a soros portra.
A tapasztalatok a következők voltak: 4m méter után semmit nem érzékel a szerkezet. Puha anyagoknál megnő a mért jel szórása. Ha a tárgy felszíne nem merőleges szenzorra, gyengébb jelet kapok, illetve a szórás itt is nagyobb lesz.
Az eredményeket összegezve arra jutottam, hogy a cuccnak a következő módon kell működnie: bekapcsolom, a szerkezet vár, hogy elhagyjam a védendő területet. Feltérképezi a teret, megjegyzi az alap távolságot. Aktiválja magát, és ha a mért távolság eltér attól, amit korábban érzékelt, akkor jelez.
Ezzel csak egy probléma van, könnyű kikerülni, ha mindig egy irányba néz. Azt találtam ki, hogy egy szervó motorral fogom forgatni a dobozt, mintha egy kacsalábon forgó palota lenne. Szerencsére a doboz henger alakú. Ez az ötlet nagyon megtetszett. A doboz teteje lehetne a talpa is egyben.
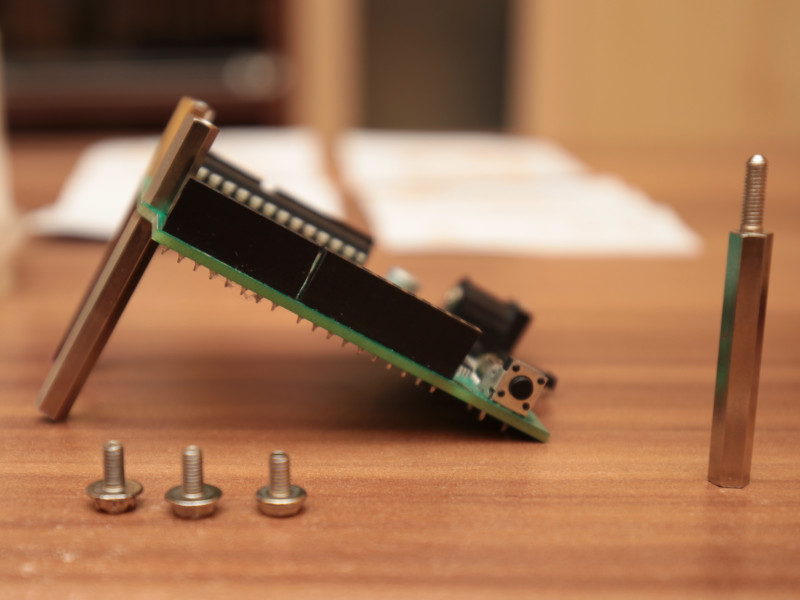
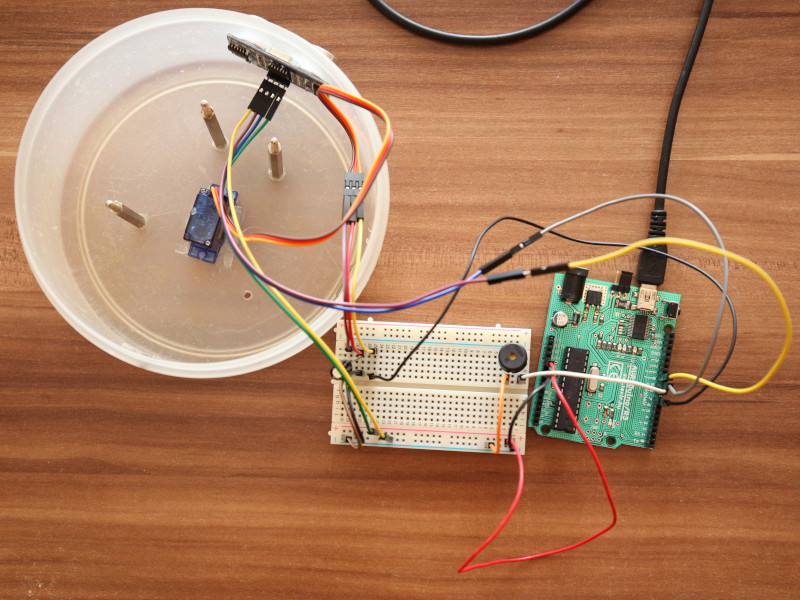
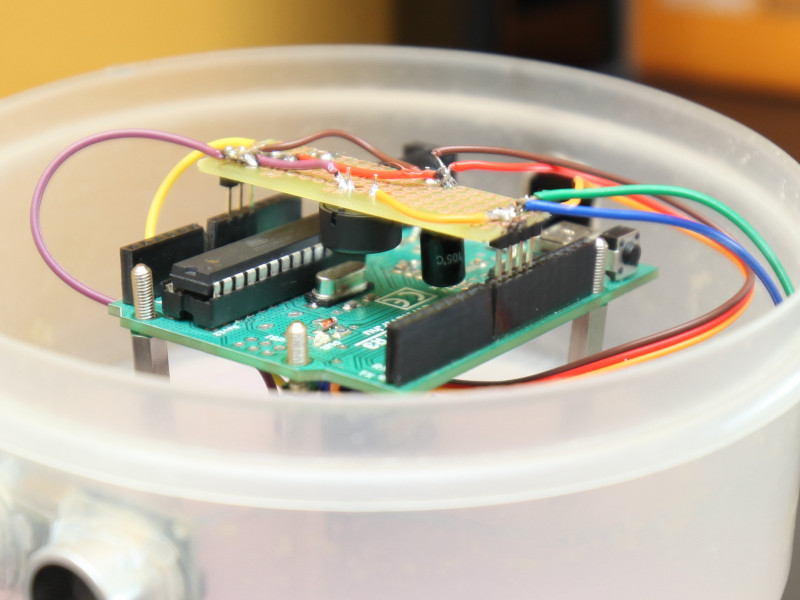
Először kifúrtam a doboz közepét, és oda rogzítettem a szervő motort. Az új design-al az volt a gond, hogy jól ki kellett egyensúlyozni. Az irányító szerepet játszó AVRDuino ezért a motor fölött volt. Találtam néhány távtartót, ami elég magas volt, hogy a motor fölé emelje a mikrokontrollert.
Szükség volt még egy kis hangszóróra, hogy jelezze a risztást, illetve azt is, mikortól aktiválja magát a rendszer.
A doboz tetejére kellett a szervó karját szerelni. Nem bíztam a ragasztókba, ezért egy vékony dróttal rögzítettem azt. Aggódtam, hogy esetleg nem tudok olyan apró lyukakat fúrni a doboz tetejébe, de az aggodalmam alaptalan volt. Egy vastagabb varrótű simán megtette, még melegíteni sem kellett.

Először egy próbapanelen kötöttem össze az egységeket, és írtam egy próbakódot. Ebben a verzióban csak akkor jelezett a riasztó, ha 1,5 méternél közelebb érzékelt valamit. A motor három pozícióba állítja be a dobozt: 45 fok, 90 fok, 135 fok. Azért, hogy még nehezebb legyen kicselezni, a pozíciók véletlenszerűen váltják egymást, így a forgás elég kiszámíthatatlan.
A tesztelés jó játék volt a lányommal, megpróbáltuk kicselezni a készüléket. Akinél jelzett, az veszített. Ő nyert, mert elfért azon a kis résen, ami a fal és szenzor mérési határa között volt.
A prototípus elég jól működött, ezért készítettem egy kis próbapanelt, amire ráforrasztottam az alkatrészeket. A forrasztás még mindig nem megy valami jól, mint az látható a képeken. Többször ellenőriztem is multiméterrel, nehogy az áram nemkívánt irányba menjen. Szerencsére minden rendben volt, a próbapanel jól vizsgázott. Még a tetejét is rá lehet tenni a könnyű szállítás végett.
Tapasztalatok a jelenlegi működés alapján: A szervó túl gyors, a forgási tengely túl kicsi, kellene valami, ami plusz támasztékot biztosít (hasonló megoldás kellene, mint ami a mikróhullámú sütő tányérja alatt is van). Meg kell oldani a tápellátást is. A hardveren viszont nem tervezek nagyobb változtatást. A következő részben a kódot fogom bemutatni.